
机器人视觉
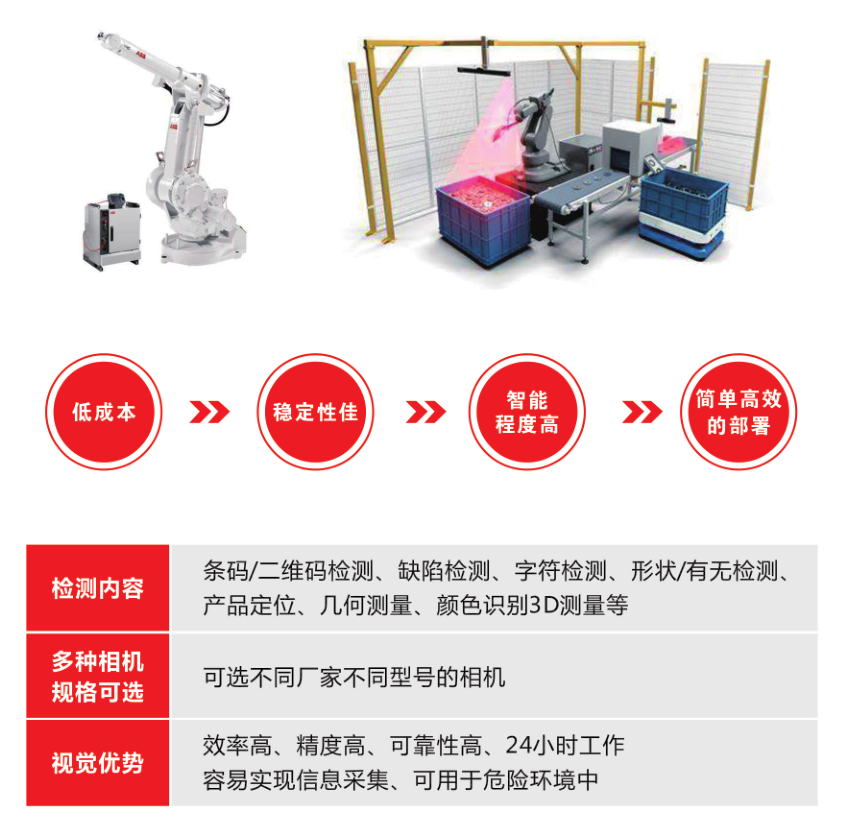
视觉可以通过视觉传感器获取环境的二维图像,并通过视觉处理器进行分析和解释 ,进而转换为符号,让机器人能够辨别物体,并确定物体位置。机器人视觉硬件 主要包括图像获取和视觉处理分析、输出或显示三部分,而图像获取由照明系统、 视觉传感器、模拟-数字转换器和帧存储器等组成。根据功能不同,机器人视觉可分为 视觉检验和视觉引导俩种,广泛用于电子、汽车、机械等工业部门和医学、军事领域等。
视觉可以通过视觉传感器获取环境的二维图像,并通过视觉处理器进行分析和解释 ,进而转换为符号,让机器人能够辨别物体,并确定物体位置。机器人视觉硬件 主要包括图像获取和视觉处理分析、输出或显示三部分,而图像获取由照明系统、 视觉传感器、模拟-数字转换器和帧存储器等组成。根据功能不同,机器人视觉可分为 视觉检验和视觉引导俩种,广泛用于电子、汽车、机械等工业部门和医学、军事领域等。